
首页 > 技术 西北工业大学:基于图分级的水下有向传感器网络栅栏覆盖策略
西北工业大学:基于图分级的水下有向传感器网络栅栏覆盖策略

西北工业大学常娟、申晓红等人在《电子与信息学报》最新文章:《基于图分级的水下有向传感器网络栅栏覆盖策略》。
栅栏覆盖问题近年来已成为水下传感器网络研究的热点,但水下有向传感器网络的栅栏覆盖问题尚未得到足够的重视。随机部署前提下的水下静态有向传感器网络的栅栏覆盖难度较大,因此目前关于该问题的相关研究成果较少。为弥补这方面研究的不足,西北工业大学团队提出了一种基于图分级的有向传感器网络首次栅栏覆盖策略。
首先,该策略深入研究了多种位置关系下两个相邻节点之间满足强 ( 弱 ) 连接的条件;
其次,利用位置关系条件构建分级图,从中选取合适节点进行栅栏的首次构建。
仿真实验结果表明:采用该算法对静态有向传感器网络进行栅栏首次构建在确保较高成功率的前提下采用的节点数更少,保证了较高的网络检测概率和较长的网络寿命。
原文:
常娟 , 申晓红 , 王海燕 , 赵红言 , 李祥祥 . 基于图分级的水下有向传感器网络栅栏覆盖策略 [ J ] . 电子与信息学报 . 预出版 .
doi: 10.11999/JEIT221304
1 引言
浅海海域内移动目标的入侵检测是我国水声传感器网络技术发展的重点之一。用于水下入侵检测网络覆盖方式通常为栅栏覆盖,关于这方面的研究大都是基于全向传感器展开的。与全向传感器不同,有向传感器的感知范围不仅取决于传感器的感知半径,还取决于它的感知方向角和偏移角,因此有向传感器网络的栅栏覆盖问题复杂度更高。本文研究的就是水下有向传感器网络的栅栏覆盖问题。
关于有向传感器网络栅栏覆盖问题,已有的大量成果中,有些仅讨论了如何利用移动传感器来构建栅栏或对栅栏漏洞进行弥补,未深入讨论如何对静态传感器网络进行首次栅栏覆盖问题。
由于水下传感器网络能量十分有限,在水下传感器网络栅栏覆盖中,通常希望在首次栅栏构建中就能够只采用静态节点成功构建栅栏,以减少二次栅栏构建带来的传感器资源浪费。
有些主要针对静态全向水声传感器网络进行首次栅栏覆盖,不适用于静态有向水声传感器网络。文献提出了一种基于邻接矩阵的水下有向传感器网络强栅栏覆盖算法,但该覆盖算法所需的节点数较多,且要求数据存储量较大。
本文主要研究如何采用尽可能少的有向传感器实现水下传感器网络的首次栅栏构建,为此提出了一种基于图分级的有向水下传感器网络分布式栅栏覆盖算法。
2 基于图分级的水下有向传感器网络分布式栅栏覆盖算法
基于图分级的有向传感器栅栏覆盖策略是基于覆盖图展开的,在构建覆盖图的过程中需要各节点确定自己的感知区域与其每一个相邻节点的感知区域是否相交,即判断两节点在覆盖图中是否连接。若每两个相邻节点之间满足弱连接,构建的栅栏为弱栅栏;若每两个相邻节点之间满足强连接,构建的栅栏为强栅栏;能否正确判断两个节点之间的连接关系是构建覆盖图和栅栏的关键。
基于图分级的有向传感器网络分布式栅栏覆盖算法,首先针对网络图利用两节点之间满足的条件确定位置关系,建立栅栏覆盖图,再根据栅栏覆盖图建立分级图,进一步明确节点之间的位置关系。最后在分级图基础上构建栅栏。利用该算法构建栅栏,由于节点拓扑关系很明确,构建栅栏采用的节点数更少。

图 1 基于图分级的水下有向传感器网络栅栏覆盖算法
3 仿真实验及结果分析

图 2 不同构建半径下,采用两种算法构建 1- 强栅栏的成功率
图 2 比较了偏移角为 β =60 °,DDHG 算法和 DPA 算法分别在感知半径为 400 m, 500 m 和 600 m 时构建 1- 强栅栏的成功率。构建成功率随着感知半径的增大而增大,并且采用 DDHG 算法的构建成功率高于采用 DPA 算法的构建成功率。
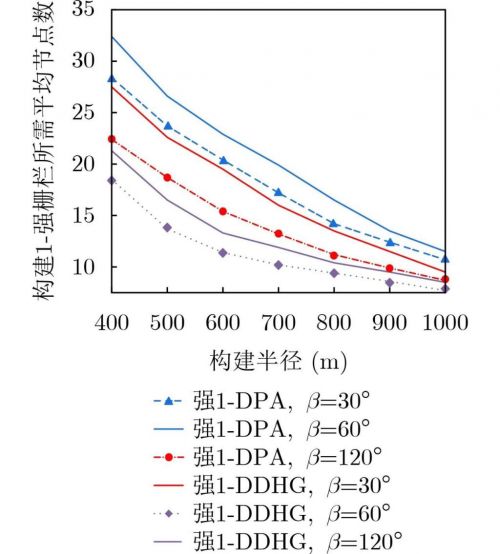
图 3 不同构建半径下,构建 1- 强栅栏所需的传感器数目
图 3 比较了随机分布 300 个节点,构建半径 Rvs=500 m 时,采用两种算法在不同偏移角构建 1- 强栅栏所需的传感器数目。该图显示:构建 1- 强栅栏所需的传感器数目随着感知半径的增大而减少,采用 DDHG 算法的构建栅栏所需的传感器数目小于 DPA 算法。

图 4 不同构建半径下,构建强栅栏的数目
图 4 比较了随机分布 300 个节点,构建半径 Rvs=500 米时,采用两种算法在不同感知半径下能够构建强栅栏的数目。构建的强栅栏数目随着感知半径的增大而增多。采用 DDHG 算法能够构建的栅栏数比采用 DPA 算法构建的栅栏数多。
图 5 不同发射声源级下,水声传感器网络的检测概率
图 5 比较了虚警概率 Pf =0.1,随机部署总节点数为 300,构建半径 Rvs=700 米时,不同发射声源级和偏移角情况下,采用两种算法的网络检测概率。由该图可以看到:采用两种算法时网络的检测概率随着发射声源级和偏移角的增大而增大。
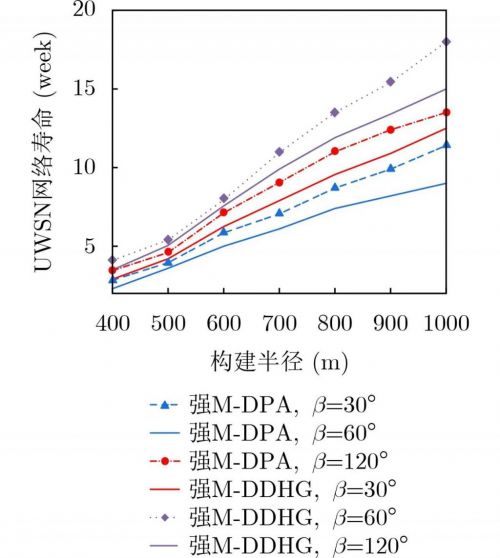
图 6 不同构建半径下,水声传感器网络的寿命
图 6 比较了随机部署总节点数为 300, 构建半径和偏移角 β 不同时,分别采用两种算法时的网络寿命。这里构建出的多个栅栏采用交替工作模式来延长网络寿命。假设每一个传感器的寿命为 2 周。由该图可以看到:采用两种算法的网络寿命随着构建半径和偏移角的增大而增大,其中相同条件下采用强 M-DDHG 算法的网络寿命比采用强 M-DPA 算法的网络寿命长。
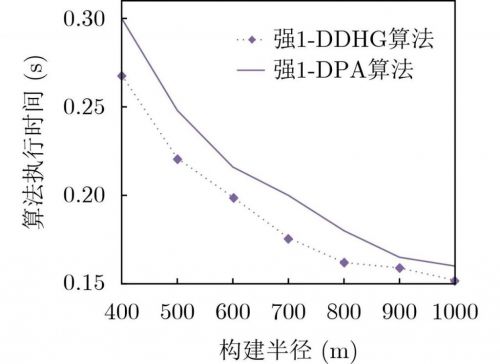
图 7 不同构建半径下,算法的执行时间
栅栏覆盖算法的执行时间不仅取决于算法的优劣,还取决于构建栅栏的数量。为了比较 DDHG 算法和 DPA 算法的优劣,这里只比较构建 1- 栅栏的算法执行时间。图 7 比较了随机部署总节点数 300, 不同构建半径下,采用不同强 1- 栅栏算法的算法执行时间。该图显示:采用两种算法的执行时间随着构建半径的增大而减少,并且采用强 1-DDHG 算法的执行时间比强 1-DPA 算法的执行时间更短,说明强 1-DDHG 算法的速度更快。
4 结束语
本文通过对有向传感器之间位置关系的讨论,明确了两个有向传感器之间建立连接关系的条件。以此条件为基础构建覆盖图并进行分级,基于分级图能够以尽可能少的节点对静态有向传感器网络进行首次栅栏覆盖。
本文提出的强 1-DDHG 算法的栅栏构建成功率比采用强 1-DPA 算法栅栏构建成功率高,并且构建栅栏所需的节点数比强 1-DPA 算法少,运算速度比强 1-DPA 算法快。采用强 M-DDHG 算法所构建的栅栏数比采用强 M-DPA 算法多,并且采用强 M-DDHG 算法时网络的检测概率和网络寿命都优于采用强 M-DPA 算法时网络的检测概率和网络寿命。因此,在进行静态有向传感器网络栅栏的首次构建时,DDHG 算法性能优于 DPA 算法。
作者团队



责任编辑:
文章来源:http://www.xinwulian.net/2023/0818/931.shtml